sistema operativo (e i suoi componenti)
gestisce le risorse hardware di un sistema computerizzato (processori, RAM, i/o) e fornisce un insieme di servizi agli utenti.
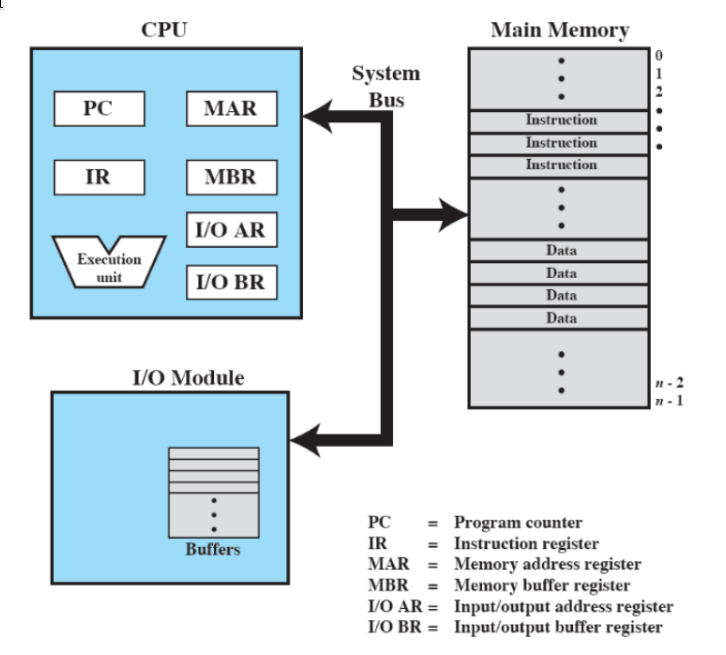
- processore - si occupa delle computazioni
- memoria principale - è volatile, se il PC si spegne se ne perde il contenuto (chiamata reale o primaria)
- I/O - memoria secondaria non volatile (dischi), comunicazione (scheda di rete..), tastiera ecc.
- “bus” di sistema - fanno comunicare le parti interne del computer
- registri
- visibili all’utente: usati dai linguaggi non interpretati
- di controllo e di stato: usati dal processore per controllare il suo utilizzo, e dal sistema operativo per controllare l’esecuzione dei programmi
- interni: usati dal processore, responsabili della comunicazione con memoria e I/O
registri visibili all’utente
- sono gli unici che possono essere usati direttamente quando si programma in linguaggio macchina.
- possono contenere dati o indirizzi (puntatori diretti, registri-indice, puntatori a segmento, puntatori a stack)
registri interni
i principali registri interni sono:
- registro dell’indirizzo di memoria (MAR): contiene l’indirizzo della prossima operazione di lettura/scrittura
- registro di memoria temporanea (Memory Buffer Register): contiene i dati da scrivere in memoria, o lo spazio dove scrivere i dati letti dalla memoria
- I/O address register (self explanatory)
- I/O buffer register: registro di memoria temporanea per I/O
registri di controllo e stato
- Program Counter: contiene l’indirizzo dell’istruzione da prelevare dalla memoria
- Instruction Register: contiene la più recente istruzione prelevata
- Program Status Word: contiene le informazioni di stato
- Flag (codici di condizione): singoli bit settati dal processore come risultato di operazioni (es. flag ALU)
Questi registri vengono letti e modificati in modo implicito dalle istruzioni assembler. Nell’architettura x86 sono considerati registri di controllo anche quelli per la gestione della memoria.
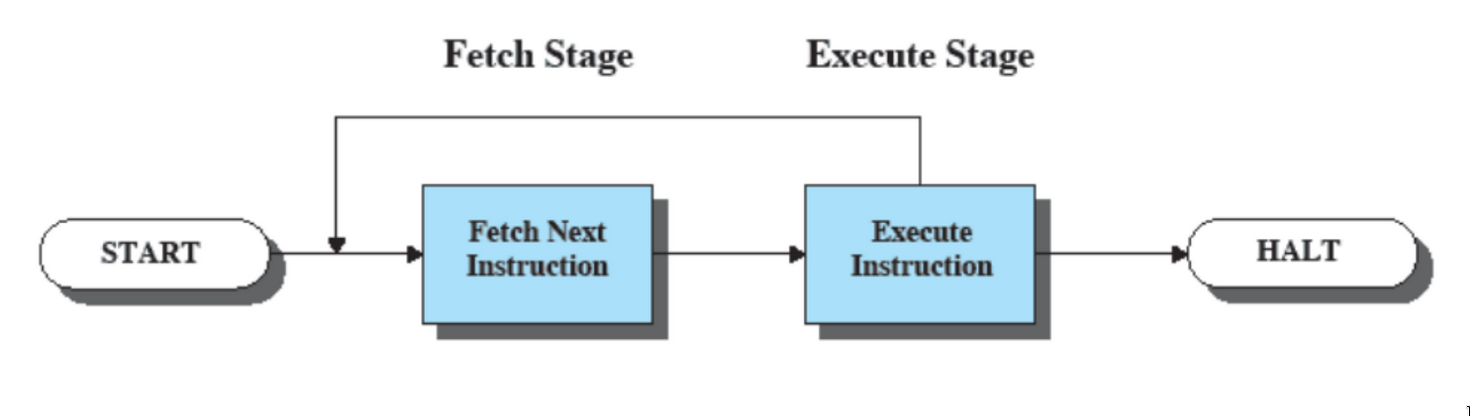
esecuzione di istruzioni
ha due passi:
- fase di fetch delle istruzioni: il processore legge il program counter e preleva le istruzioni dalla memoria principale (il PC è incrementato dopo ogni prelievo, oppure modificato da un jump)
- fase di execute: il processore esegue ogni istruzione prelevata:
- l’istruzione prelevata viene caricata nell’Instruction Register
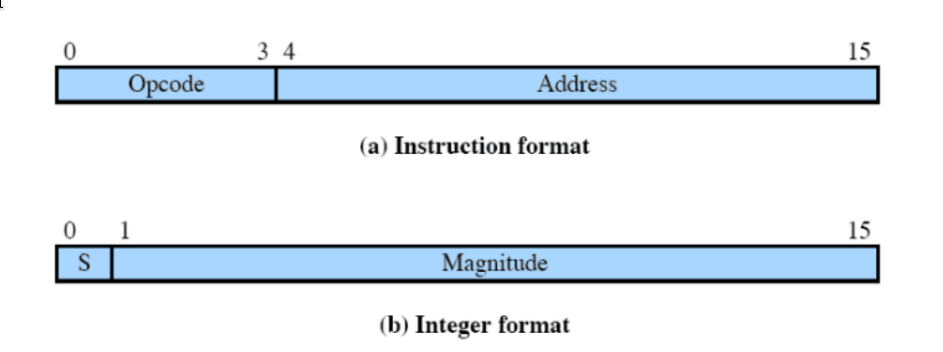
caratteristiche di una macchina ipotetica
Le istruzioni hanno un formato da 16 bit: 4 sono presi dall’OPcode, e 12 dall’address. Anche gli interi hanno un formato da 16 bit: 1 bit per il segno, e 15 per la magnitudo
interruzioni
le interruzioni interrompono la normale esecuzione sequenziale del processore (who would have thought).
- come consequenza, viene eseguito software “di sistema”, parte del sistema operativo.
Le cause sono molteplici, e danno luogo a diverse classi di interruzioni:
- da programma (sincrone)
- da I/O, da fallimento hardware, da timer (asincrone)
Le interruzioni sincrone interrompono immediatamente l’esecuzione del programma, mentre mentre quelle asincrone vengono sollevate successivamente.
classi di interruzioni asincrone
- interruzioni da I/O
- interruzioni da fallimento HW (es. power failure)
- interruzioni da comunicazione tra CPU
- interruzioni da timer
per i processori intel, sono chiamati interrupt
classi di interruzioni sincrone
- interruzioni di programma causate da: overflow, divisione per 0, debugging, errori di riferimenti a memoria, istruzioni errate, syscall
per i processori intel, sono chiamate exception
Per le interruzioni asincrone, una volta che l’handler è terminato, si riprende dall’istruzione successiva a quella interrotta. Per quanto riguarda le interruzioni sincrone, invece, non è detto. Esistono infatti diversi tipi di errori:
| errore | risoluzione |
|---|---|
| fault | errore corregibile, viene rieseguita la stessa istruzione |
| abort | errore non corregibile, si esegue software collegato all’errore |
| trap, system call | si continua dall’istruzione successiva |
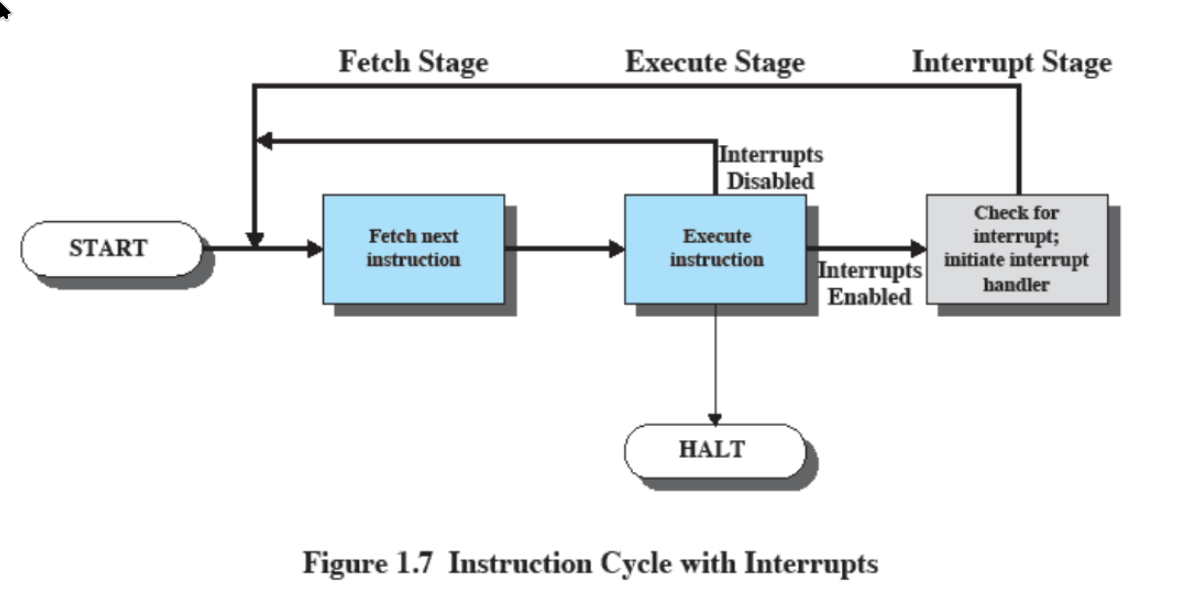
fase di interruzione
ad ogni ciclo fetch-execute, viene controllato anche se c’è stata un’interruzione o un’exception - in quel caso, il programma viene sospeso e viene eseguita la interrupt-handler routine.
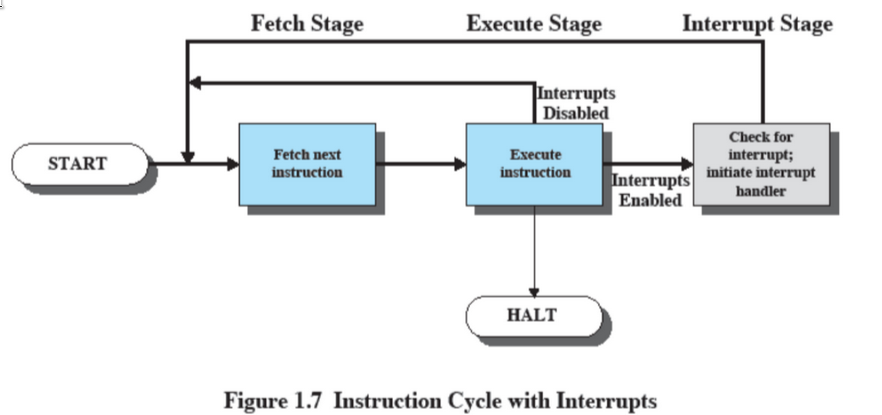
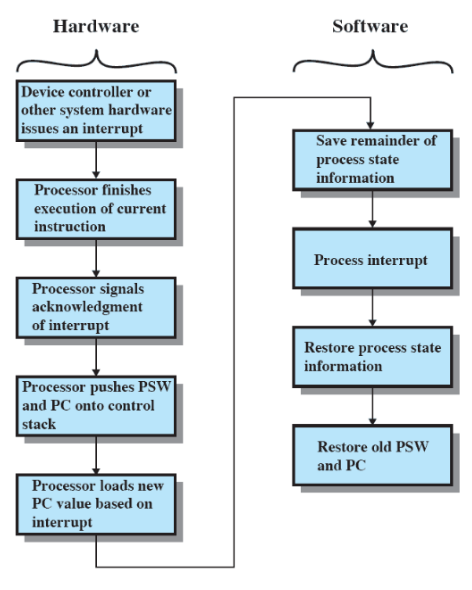
Nell’interrupt handler, sistema operativo e hardware collaborano per salvare le informazioni e settare il Program Counter.
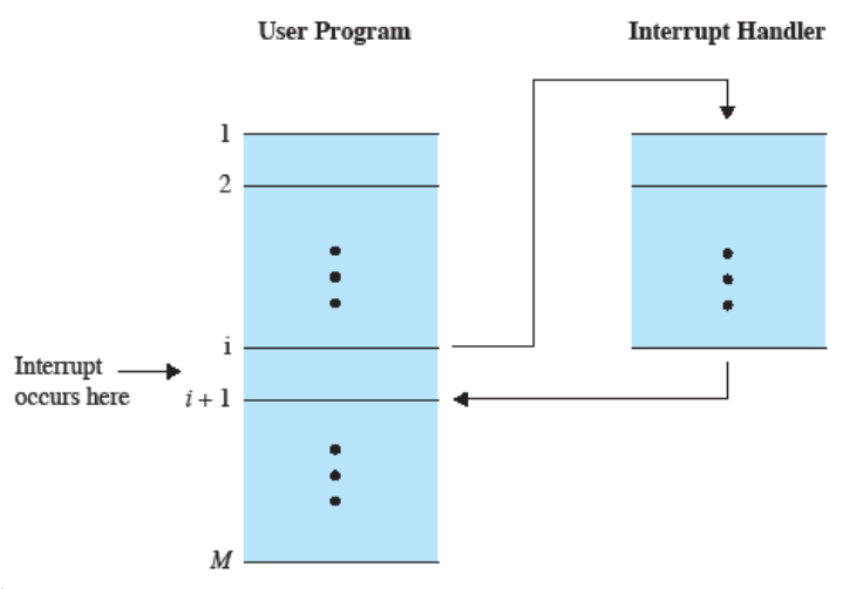
iter dell'interruzione di un programma
Una volta completato l’handler, si torna all’indirizzo N+1 (o N, nel caso fosse una fault corregibile)
interruzioni disabilitate
In alcuni casi, le interruzioni possono essere disabilitate.
In quel caso
interruzioni annidate e sequenziali
Le interruzioni possono essere di due tipi:
- interruzioni annidate: se, mentre eseguo un’interruzione, mi arriva una seconda interruzione, metto momentaneamente in pausa la prima per eseguire la seconda
- interruzioni sequenziali: se, mentre eseguo un’interruzione, mi arriva una seconda interruzione, finisco di eseguire la prima per poi passare alla seconda
gestione I/O
[ questo argomento viene approfondito qui ]
INPUT/OUTPUT PROGRAMMATO
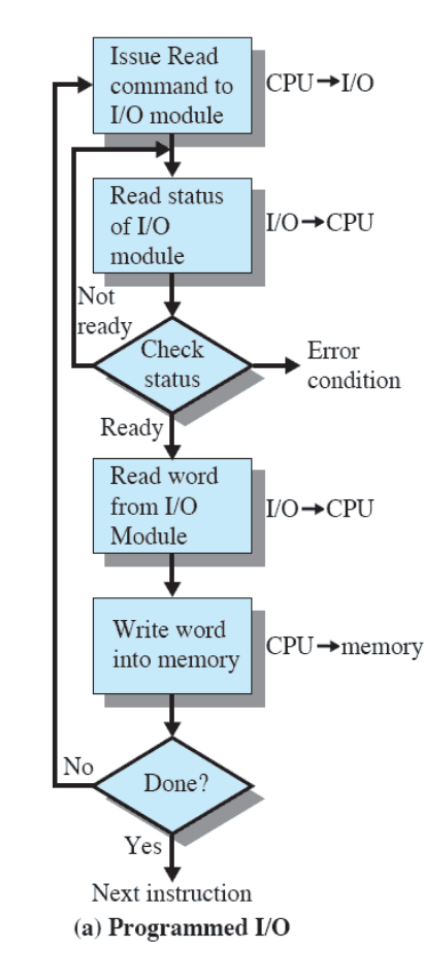
In passato, l’I/O veniva gestito tramite l’input/output programmato:
- l’azione (di lettura/scrittura) viene effettuata, invece che dal processore, dal modulo di I/O, che setta i bit appropriati sul registro di stato dell’I/O
- il processore controlla lo status finché l’operazione non è completa (busy waiting) e rimane quindi bloccato
- non ci sono interruzioni
INPUT/OUTPUT DA INTERRUZIONI
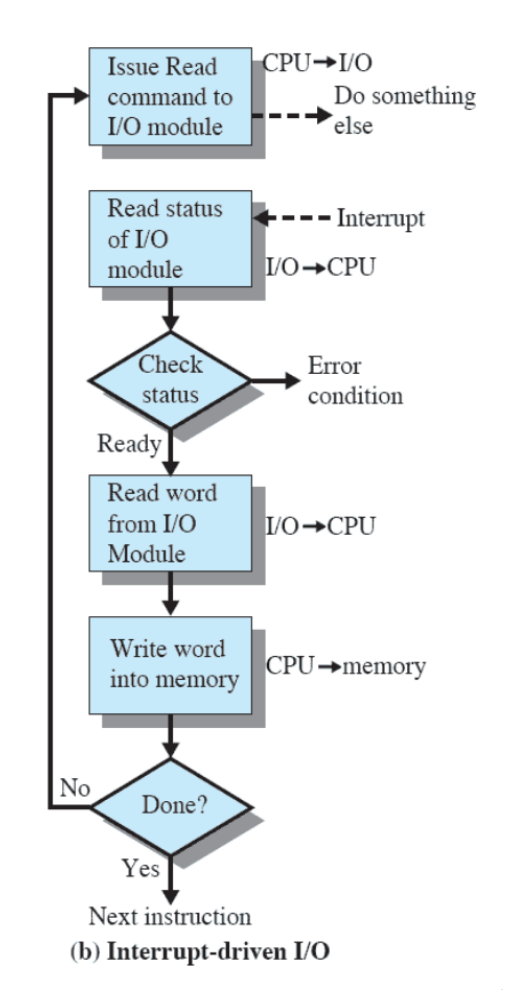
Una gestione più moderna è quella dell’input/output da interruzioni:
- il processore viene interrotto quando il modulo I/O è pronto a scambiare dati (la CPU non deve aspettare e controllare costantemente, ma può fare altre cose)
- il processore salva il contesto del programma che stava eseguendo e comincia ad eseguire il gestore dell’interruzione
- non c’è inutile attesa, ma consuma comunque tempo di processore, poiché ogni singolo dato letto o scritto interrompe l’esecuzione del processore
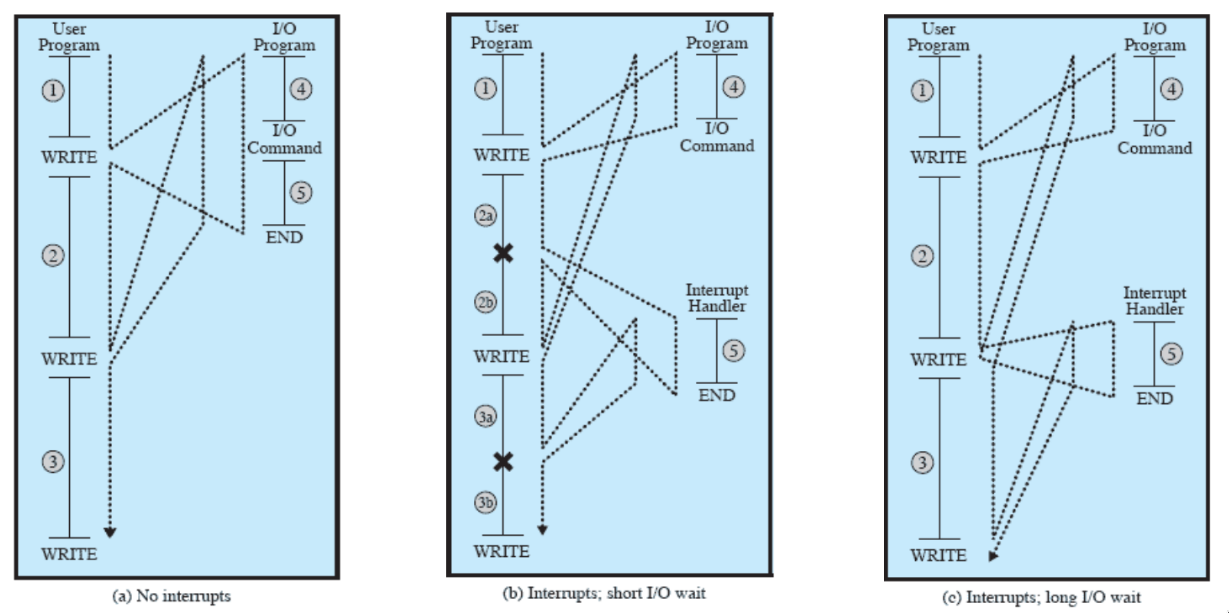
flusso di controllo
- nel primo caso, si può notare che il processore deve finire di eseguire il write prima di continuare con le operazioni precedenti
- nel secondo caso, il processore, una volta ricevuto un write, manda un comando al modulo dell’I/O e continua a svolgere le operazioni fino a quando l’interrupt handler non lo notifica del fatto che l’operazione è terminata
- nel terzo caso vediamo come, se l’operazione di I/O è particolarmente lunga, se riceve una seconda richiesta di write prima che la prima sia terminata, la CPU termina la prima prima di mandare il comando per la seconda e continuare le altre operazioni
ACCESSO DIRETTO IN MEMORIA
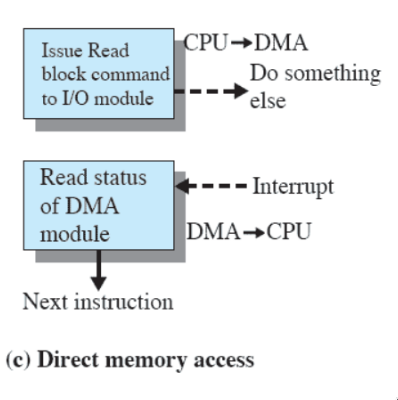 Il processo utilizzato dai computer più attuali è invece quello dell’accesso diretto in memoria:
Il processo utilizzato dai computer più attuali è invece quello dell’accesso diretto in memoria:
- le istruzioni di I/O tipicamente richiedono di trasferire informazioni tra dispositivo di I/O e memoria: la DMA trasferisce un blocco di dati direttamente da/alla memoria
- un’interruzione viene mandata quando il trasferimento è completato
multiprogrammazione
- un processore deve eseguire più programmi contemporaneamente
- la sequenza con cui i programmi sono eseguiti dipende dalla loro priorità e dal fatto che siano o meno in attesa di I/O
- Alla fine della gestione di un’interruzione, il controllo potrebbe non tornare al programma che era in esecuzione al momento dell’interruzione
gerarchia della memoria
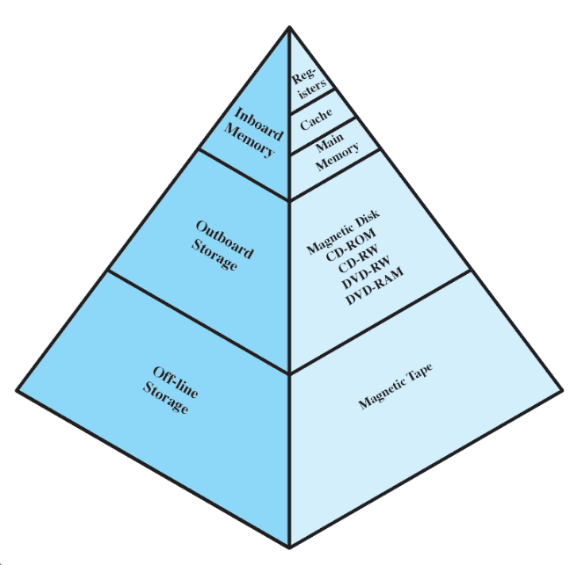
La memoria è organizzata in modo gerarchico, ed è divisa in:
- inboard memory:
- registri
- cache
- main memory (RAM)
- outboard storage
- disco magnetico, CD-ROM, CD-RW, DVD-RW, DVD-RAM
- off-line storage
- nastro magnetico
Dall’alto verso il basso:
- diminuisce la velocità di accesso
- diminuisce il costo al bit
- aumenta la capacità
- diminuisce la frequenza di accesso alla memoria da parte della CPU
memoria secondaria
corrisponde ad outboard e offline storage.
- è una memoria ausiliaria ed esterna
- non è volatile, quindi il contenuto non si perde allo spegnimento del computer
- viene usata per memorizzare files
cache
anche all’interno dell’inboard memory stessa ci sono importanti differenze di velocità: infatti, la velocità del processore è maggiore della velocità di accesso alla memoria principale (RAM).
- per evitare eccessivi tempi di attesa, tutti i computer hanno una memoria cache, piccola e veloce, che sfrutta il principio di località (se si utilizzano dei dati a un determinato indirizzo, è probabile che a breve serviranno i dati ad esso vicini)
- la cache contiene copie di porzioni della RAM (quelle a cui accedere più velocemente)
- il processore controlla se un dato è nella cache: se non è presente (miss), il blocco corrispettivo viene caricato (per il principio di località)
- è gestita completamente dall’hardware: assembler, compilatore, SO ecc. non la vedono
altre info cache
(architettura degli elaboratori di base)
- cache anche piccole hanno un grande impatto sulla performance
- bisogna trovare un “sweet spot” per la dimensione di una cache: l’accesso a una cache più piccola è più veloce, ma una cache più grande può contenere più dati
- la cache utilizza una funzione di mappatura per determinare dove mettere il blocco proveniente dalla RAM, e un algoritmo di rimpiazzamento per scegliere quale blocco eliminare (comunemente LRU)
- la politica di scrittura della cache determina quando scrivere in memoria (o quando un blocco viene modificato - write through, o quando un blocco viene rimpiazzato - write through)
sistema operativo
- gestisce le risorse hardware (processori, RAM, I/O)
- il suo scopo è fornire servizi agli utenti
servizi offerti da un sistema operativo
- esecuzioni di programmi
- accesso ad I/O e al sistema operativo stesso (shell)
- sviluppo di programmi
- rilevamento di/reazione ad errori
- accounting (statistiche dell’uso, monitoraggio performance…)
- controlla l’esecuzione dei programmi applicativi e fornisce un’interfaccia tra applicazioni e hardware
obiettivi di un sistema operativo
- convenienza, efficienza, capacità di evolvere
- è responsabile anche della gestione delle risorse: funziona come un software, ma con privilegi più alti.
- concede il controllo del processore ad altri programmi e controlla l’accesso alle altre risorse
kernel
il kernel (“nucleo”) è la parte di sistema operativo che si trova sempre nella RAM.
- contiene le funzioni più usate
caratteristiche hardware
- protezione della memoria - non permette che la zona di memoria contenente il monitor venga modificata
- i programmi utente vengono eseguiti in modalità utente, mentre il monitor viene eseguito in modalità sistema o kernel - (le istruzioni privilegiate possono essere eseguite e si può accedere alle aree protette della memoria)
- timer - impedisce che un job monopolizzi l’intero sistema
- istruzioni privilegiate - possono essere eseguite solo dal monitor (es. interruzioni)
programmazione singola vs multiprogrammazione
- con la programmazione singola, il processore deve aspettare che le istruzioni I/O siano completate prima di procedere
- con la multiprogrammazione, se un job deve aspettare che un’istruzione I/O sia completata, il processore può passare ad un altro job
sistemi a time sharing
- usano la multiprogrammazione per gestire contemporaneamente più jobs interattivi
- il tempo del processore è condiviso tra più utenti, che accedono contemporaneamente al sistema tramite terminali
batch vs time sharing
(il batch è un semplice sistema non interattivo degli anni 60. utilizza un programma esterno di monitoraggio, del software per controllare le sequenze di eventi, e permette di raggruppare jobs da eseguire insieme - il programma, una volta concluso, ritorna il controllo al programma esterno di monitoraggio)
batch time sharing scopo massimizzare l’uso del processore minimizzare il tempo di risposta provenienze delle direttive all’OS comandi del job control language, sottomessi con il job stesso comandi dati da terminale
dal job al processo
il processo riunisce in un unico concetto il job non-interattivo e quello interattivo.
- incorpora anche il job “transazionale real-time” (degli anni 70, es. prenotazione biglietti aerei)
è un’unità di attività caratterizzata da:
- un singolo thread di esecuzione
- uno stato corrente e un insieme di risorse di sistema ad esso associate
difficoltà della multiprogrammazione dei processi
- errori di sincronizzazione: gli interrupt si perdono o vengono ricevuti due volte
- violazione della mutua esclusione: ci sono problemi se due processi vogliono accedere alla stessa risorsa
- programmi con esecuzione non deterministica: un processo accede ad una porzione di memoria modificata da un altro processo
- deadlock (stallo): processo A attende processo B che attende A
per questo, è necessaria una buona gestione della memoria
gestione della memoria
- i processi vengono isolati
- gli accessi sono protetti e controllati
- la gestione della memoria (compresa allocazione/deallocazione) è automatica
- è supportata la programmazione modulare (stack)
- memorizzazione a lungo termine
protezione dell'informazione e sicurezza
- disponibilità - il dover proteggere il sistema contro l’interruzione di servizio (DoS)
- confidenzialità - garanzia che gli utenti non leggano informazioni per le quali non hanno l’autorizzazione
- integrità dei dati - protezione dei dati da modifiche non autorizzate
- autenticità - dover verificare l’identità degli utenti/la validità di messaggi e datib